Cinematique
La cinématique, c’est l’étude du mouvement à partir des positions. On y définit la position, la vitesse, et l’accélération au cours du temps.
Etude dans un repère cartésien
Référentiel
Definition: C’est l’espace, muni d’un repère, dans lequel on étudie un mouvement.
Quelques référentiels particuliers:
| nom | centré sur | axes du repère | On y étudie … |
|---|---|---|---|
| Héliocentrique | Soleil | Dirigés vers des étoiles lointaines | mouvement des objets du système Solaire (planètes…). La Terre fait un tour en 365j dans le ref Héliocentrique |
| Géocentrique | Terre | Dirigés vers des étoiles lointaines | mouvement des satellites de la Terre. La Terre fait un tour sur elle-même en 24h dans ce ref. |
| Terrestre | Terre | Fixés avec la Terre | mouvement des objets à la surface de la Terre. Aussi appelé le référentiel du laboratoire. |
Dans un référentiel cartésien, le réféntiel est muni d’un repère (0,x,y,z).
exemple de repère cartésien (O,x,y)
Trajectoire
Definition: C’est l’ensemble des points qui représentent le mouvement (M1, M2, … Mn).
On considère le mouvement comme une succession continue de petits mouvements. Les positions sont alors marquées de manière discrète (discrétisation du temps), espacés avec des intervalles de temps égaux, Δt.
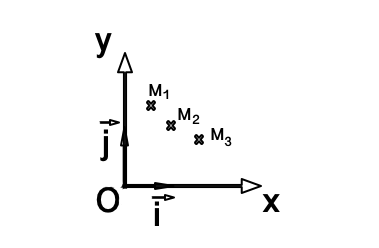
exemple de trajectoire dans le
Coordonnées d’un point
Un point Mn est alors repéré par ses coodonnées $M\binom{x_n}{y_n}$, ou bien grâce au vecteur position $\overrightarrow{OM}\binom{x_n}{y_n}$
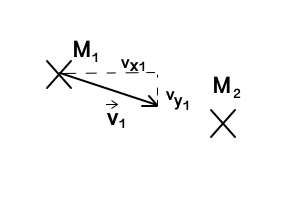
Coordonnées du vecteur vitesse
Définition: la vitesse est le taux de variation de la position, en fonction du temps. Il s’agit d’un vecteur. Au moment n, c’est le vecteur $\overrightarrow{v_n}$. Ce vecteur est tangent à la trajectoire.
Comme: $\overrightarrow{v}\binom{v_x}{v_y}$, on a:
$$\overrightarrow{v_n} \begin{pmatrix} vx_n\\vy_n \end{pmatrix}$$
- Au moment n: en une durée Δt, la coordonnée xn varie de xn à xn+1. Alors vxn représente le taux de variation de cette coordonnée selon l’axe des x.
- Au moment n: en une durée Δt, la coordonnée yn varie de yn à yn+1. D’où la loi sur vyn:

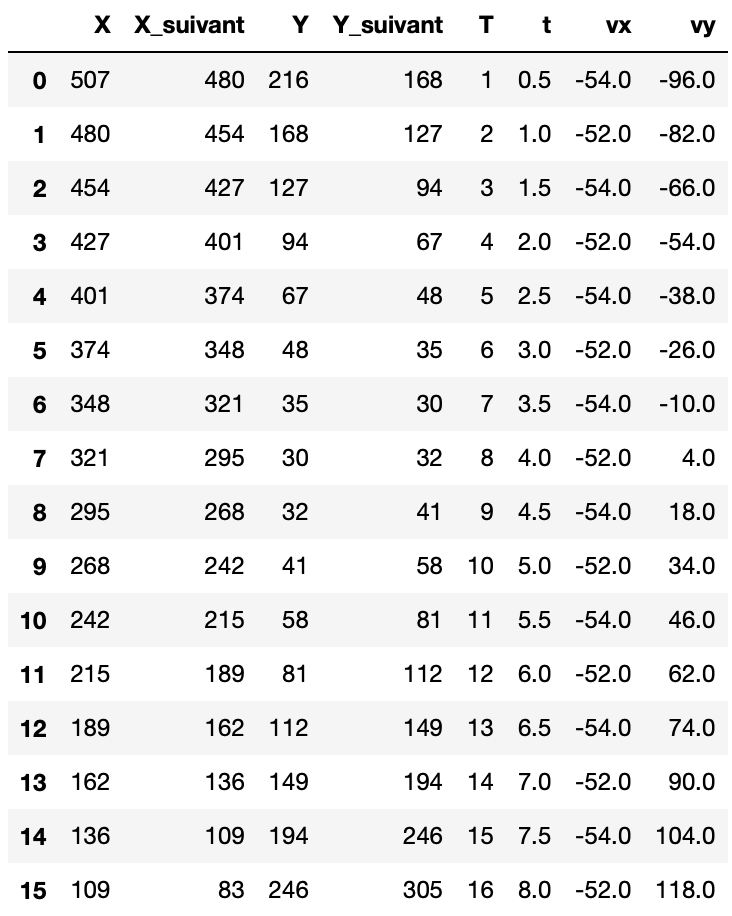
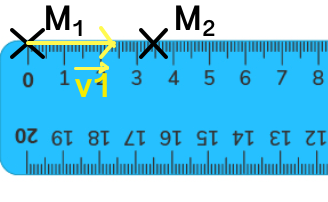
Exemple avec données obtenues
Et on peut tracer le vecteur $\overrightarrow{v_n}$ à partir de ses coordonnées, vxn et vyn, de sommet Mn, directement sur la trajectoire:
Exemple avec
Coordonnées du vecteur accélération
Définition: l’accélération est le taux de variation de la vitesse, en fonction du temps. Il s’agit d’un vecteur. Au moment n, c’est le vecteur $\overrightarrow{a_n}$
- Au moment n: en une durée Δt, la vitesse vxn varie de vxn à vx n+1. Alors axn représente le taux de variation de cette coordonnée selon l’axe des x.
- Au moment n: en une durée Δt, la vitesse vyn varie de vyn à vy n+1. D’où la loi sur ayn:

- Pour un mouvement accéléré dans la direction (Ox), ax est positif, et la vitesse vx augmente au cours du temps.
- Pour un mouvement décéléré dans la direction (Ox), ax est négatif, et la vitesse vx diminue au cours du temps.
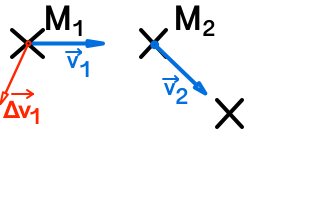
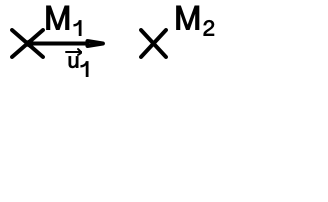
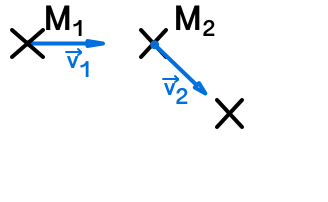
Etude par une méthode géométrique
On peut ignorer les coordonnées de position, et repérer les directions avec des vecteurs unitaires $\overrightarrow{u_1}$, $\overrightarrow{u_2}$, etc…
Alors le déplacement de M1 vers M2 est repéré par le vecteur $\overrightarrow{M_1M_2}$ tel que:
$$\overrightarrow{M_1M_2} = M_1M_2.\overrightarrow{u_1}$$
Vitesse
La definition de la vitesse, au point Mn, sera prise comme le taux de variation de la position, entre les points Mn et Mn+1:

Mais, pour des mouvements courbes, on peut prendre la vitesse en Mn+1 comme le taux de variation de la position, entre les points Mn et Mn+2. La durée est alors de 2.Δt. Cela donne:

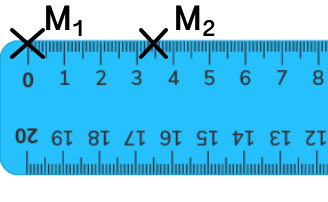
En pratique: On mesure le segment M1M2. On divise par Δt.
Accélération
L’accélération au point Mn, sera prise comme le taux de variation de la vitesse, entre les points Mn et Mn+1:

Mais là aussi, pour des mouvements courbes, on peut avoir:

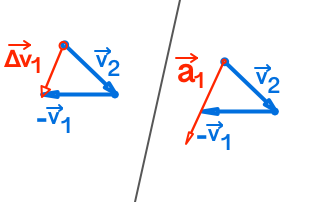
En pratique: En prenant la première définition. Au point M1:
Pour tracer les vecteur $\overrightarrow{a_1}$, on utilise alors l’echelle proposée sur le document (1cm <-> …m/s2): à droite sur le schéma.
à gauche: vecteur